Å─ÖCŲ„╚╦šZę¶ūRäeĄ─ļyęū│╠Č╚║═æ¬ė├─┐Ą─üĒšfŻ¼┐╔ęįīóšZę¶ūRäeĘų×ķā╔┤¾ ŅÉŻ¼╝┤╠žČ©╚╦Ą─šZę¶ūRäeŽĄĮy║═ĘŪ╠žČ©╚╦Ą─šZę¶ūRäeŽĄĮyĪŻ
╦∙ų^╠žČ©╚╦šZę¶ūRäeŽĄĮy╩ŪųĖŻ¼┼ąČ©šfįÆ╚╦Ą─┬Ģę¶╩Ū▓╗╩Ū╩┬Ž╚ųĖČ©Ą──Ū éĆ╚╦Ż¼╗“š▀╩Ū▓╗╩Ū╩┬Ž╚ųĖČ©Ą─ę╗┤¾┼·╚╦ųąĄ──│ę╗éĆĪŻŽ╚ę¬ėøæøę╗éĆ╚╦╗“š▀ ÄūéĆ╚╦Ą─šZę¶╠žš„Ż¼Č°Ūę▒╗ųĖČ©Ą─╚╦Ą─ųvįÆā╚╚▌ę▓╩Ū╩┬Ž╚ęÄČ©║├Ą─ėąŽ▐Č©Ą─ ÄūŠõįÆĪŻ
╠žČ©╚╦šZę¶ūRäeŻ¼Ž╚꬚ę│÷įÆ궥─Ų³c║═ĮK³cĪŻīŹ“×ūC├„Ż¼×ķ┴╦ūRäe ░lčį╚╦Ą─įÆŻ¼Ž╚꬚ę│÷šZ궥─Ų³c║═ĮK³cĪŻ×ķ┤╦Ż¼ŽĄĮy▀Ćę¬─▄ē“▒Ż┴¶ę╗Č╬ ┬Ģ궹┼╠¢Ż¼«ö░l¼F├„’@Ą─┬Ģ궹┼╠¢ĢrŻ¼ę¬Å─▀@³cŽ“Ū░┐╝▓ņĖ„éĆČ╠ĢrķgČ╬Ą─Ę∙Č╚┼c▀^┴ŃČ╚Ż¼ų╗ę¬Ųõųąų«ę╗│¼▀^─│éĆŽ▐ųĄŻ¼Š═šJ×ķ▀@Č╬▀Ć╩Ūī┘ė┌░lę¶Č╬Ż¼ų▒ ĄĮ▀@ā╔ĘN╠žš„Č╝Ą═ė┌Ž▐ųĄĢr▓┼═Żų╣┐╝▓ņŻ¼▀@éĆĢrķg³cŠ═╩ŪšZ궥─Ų³cĪŻ
ī”ė┌ ĮK³cŻ¼ę▓ė├ŽÓ═¼Ą─▐kĘ©üĒ┼ąäeĪŻ╠žČ©╚╦šZę¶ūRäeŽĄĮy┼ąäeĄ─╗∙▒ŠĘĮĘ©╩ŪŻ║ Ž╚┤_Č©ūRäeĘĮĘ©╦∙ė├Ą─╠žš„Ż¼Ųõ┤╬īóĮė╩šĄĮĄ─įÆę¶╠ß╚Ī╠žš„ŠžĻćŻ¼╚╗║¾┼c╩┬ Ž╚┤µā”į┌ŽĄĮyų«ā╚Ą─ś╦£╩─Ż░ÕųąĄ─╠žš„ŠžĻćŽÓ▒╚▌^Ż¼ėŗ╦Ń╦³éāĄ─ŠÓļxĪŻ▀@éĆ ŠÓļx┐╔ęįė├Ė„éĆī”æ¬Ą─╠žš„ųĄų«▓ŅĄ─ŲĮĘĮ║═üĒČ©Č©┴xĪŻ
╚ń╣¹ŠÓļxąĪė┌─│éĆ ųĄŻ¼ätŽĄĮyšJ×ķįō░lčį╚╦╩ŪųĖČ©Ą─░lčį╚╦Ż¼▓ó┤_Č©╦∙šfĄ─įÆ╩Ū╩▓├┤ĪŻŲõ┤¾ų┬ ┴„│╠╚ńłD4-18╦∙╩ŠĪŻ
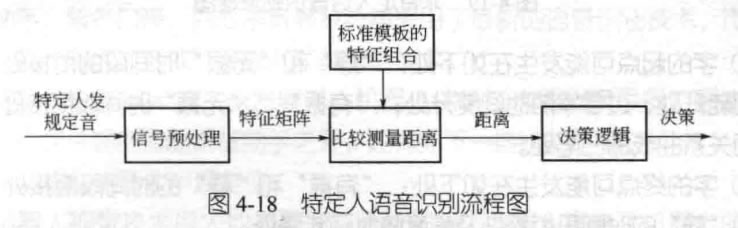
╠žČ©╚╦šZę¶ūRäeŽĄĮy┼ąäeĄ─╗∙▒ŠĘĮĘ©╩ŪŻ║
ó┘┤_Č©ūRäeĘĮĘ©╦∙ė├Ą─╠žš„Ż╗
ó┌īóĮė╩šĄĮĄ─įÆę¶╠ß╚Ī╠žš„ŠžĻćŻ╗
ó█┼c╩┬Ž╚┤µā”į┌ŽĄĮyų«ā╚Ą─ś╦£╩─Ż░ÕųąĄ─╠žš„ŠžĻćŽÓ▒╚▌^Ż¼ėŗ╦Ń╦³éāĄ─ŠÓļxĪŻ▀@éĆŠÓļx┐╔ęįė├Ė„éĆī”æ¬Ą─╠žš„ųĄų«▓ŅĄ─ŲĮĘĮ║═üĒČ©┴xĪŻ
ó▄╚ń╣¹ŠÓļxąĪė┌─│éĆųĄŻ¼ätŽĄĮyšJ×ķįō░lčį╚╦╩ŪųĖČ©Ą─░lčį╚╦Ż¼▓ó┤_Č©╦∙šfĄ─įÆ╩Ū╩▓├┤ĪŻ
TOP5 ÅS╔╠Ę▌Ņ~ŠS│ųį┌ 60%,Ė„╝ęÅS╔╠ĘeśOīżŪ¾═╗ŲŲŻ¼┼┼├¹ŪąōQ╝ż┴ęĪŻš¹éĆģfū„ÖCŲ„╚╦╩ął÷ģó┼c═µ╝ęš²į┌▓╗öÓį÷ČÓŻ¼ ╩ął÷ę▓Ģ║╬┤Č©ą═Ż¼Ė„ŅÉ═µ╝ęąŅä▌┤²░l
▒Š═┴ģfū„ÖCŲ„╚╦Ų¾śIš╣¼FŲõžSĖ╗Ą─ĮŌøQĘĮ░Ė╝░Ė▀ąįār▒╚,Ę÷│ųš■▓▀×ķÖCŲ„╚╦ąąśIĄ─┐ņ╦┘░lš╣╠ß╣®┴╦▒ŻšŽ;ģfū„ÖCŲ„╚╦Š▀ėąĖ³ÅVĄ─æ¬ė├čėš╣ąįį┌╣żśIŅIė“æ¬ė├║═ĘŪ╣żśIŅIė“ķ_═žą┬ł÷Š░
Ų▓ĮŲ┌Ż©2015-2017 ─Ļ)╚╦ÖC╣▓╚┌ųØu│╔×ķąąśI░lš╣Ą─║╦ą─ĘĮŽ“┼c╩ął÷ų„┴„┌ģä▌;š{š¹Ų┌Ż©2018-2019 ─ĻŻ®▀M╚ļą▐¤Æā╚╣”Ą─ļAČ╬;ĘĆ▓ĮŲ┌Ż©2022-2024 ─ĻŻ®š╣¼F│÷┴╦Ųõ░lš╣Ą─ÅŖä┼Ēgąį┼cØō┴”
═©▀^ļŖ┴„ŁhĪóĻP╣Ø┴”Šžé„ĖąŲ„Īó░▓╚½Ųż─wī”═Ō▓┐┴”ėX▀MąąĖąų¬Ż¼Å─Č°▀_│╔ī”Ī░┼÷ū▓Ī▒Ą─ėąą¦Öz£y;ļŖ┤┼▒¦äxķlÅ─Įė╩šĄĮųŲäėą┼╠¢ĄĮ═Ļ│╔ųŲäėĄ─Ēææ¬Ģrķg┐╔┐žųŲį┌ 50ms ęįā╚
2D ╝╝ągŲ▓Į▌^įńŻ¼╝╝ąg║═æ¬ė├ę▓ŽÓī”│╔╩ņ;3D ęĢėXĖ³ĮėĮ³╚╦č█Ż¼Ųõ║╦ą─į┌ė┌ī” 3D Äū║╬öĄō■Ą─▓╔╝»║═└¹ė├,┐╔½@╚Ī╬’¾wĄ─╔ŅČ╚ą┼ŽóŻ¼īŹ¼FČÓŠSČ╚Č©╬╗ūRäe
ģfū„ÖCŲ„╚╦į┌╩ął÷╔ŽĄ─│╔╣”æ¬ė├Ż¼ ėąų·ė┌╠ßĖ▀╚╦éāī”ÖCŲ„╚╦╝╝ągĄ─šJų¬Č╚║═Įė╩▄Č╚Ż¼×ķ╚╦ą╬ÖCŲ„╚╦Ą─╩ął÷═ŲÅV┤“Ž┬╗∙ĄA;ę╗ą®×ķ╚╦ą╬ÖCŲ„╚╦čą░lĄ─Ė▀ąį─▄é„ĖąŲ„║═▌p┴┐╗»▓─┴ŽŻ¼┐╔─▄Ģ■ųØuæ¬ė├ĄĮģfū„ÖCŲ„╚╦ųąŻ¼╠ßĖ▀ģfū„ÖCŲ„╚╦Ą─ąį─▄║═ĖéĀÄ┴”
╣żū„šŠ▒žĒÜįOų├Ė„ĘNé„ĖąŲ„,«ö╚╦åT¤o╣╩▀M╚ļĘ└ūoģ^ĢrŻ¼┴ó╝┤╩╣╣żū„šŠųąĄ─Ė„ĘN▀\äėįOéõ═Żų╣╣żū„;╗“ÖCŲ„╚╦╝░Ųõų▄▀ģįOéõ▒žĒÜį┌ĮĄ╦┘Śl╝■Ž┬åóäė▀\▐D
ÖCŲ„╚╦╩ų═¾╦∙─▄ūź╚ĪĄ─┘|┴┐╩ŪÖCŲ„╚╦ę╗éĆųžę¬ąį─▄ųĖś╦;ÖCŲ„╚╦Ą─├¹┴x╣żū„┐šķg╩ŪÖCŲ„╚╦Ą─┴Ē ę╗ éĆųžę¬ąį─▄ųĖś╦;ūįė╔Č╚╩Ūʱ┐╔ęįį┌ū„śIĘČć·ā╚ØMūŃū„śIĄ─ū╦æBę¬Ū¾
╣╠Č©┬ĘÅĮī¦ę²ĘĮ╩Į╩Ūį┌ŅAČ©ąą±é┬ĘÅĮ╔ŽįOų├ī¦ę²ė├Ą─ą┼Žó├ĮĮķ╬’,ÖCŲ„╚╦į┌ąą±é▀^│╠ųąīŹĢrÖz£yą┼Žó├ĮĮķ╬’Ą─ą┼ŽóČ°Ą├ĄĮī¦ę²;ūįė╔┬ĘÅĮī¦ę²ĘĮ╩Į╩Ūį┌AGV╔Žā”┤µų°ąą±éģ^ė“▓╝Šų╔ŽĄ─│▀┤ńū°ś╦Ż¼═©▀^ę╗Č©Ą─ĘĮĘ©ūRäe▄ć¾wĄ─«öŪ░ĘĮ╬╗
AGV┐žųŲŲ„╩Ū╠Ä└ĒŲ„║╦ą─;“īäėŽĄĮy╝»│╔┴╦ąą±é┼c▐DŽ“ā╔éĆå╬į¬;ī¦║ĮŽĄĮyĮYśŗŠo£ÉĪó╩╣ė├║åå╬Īóī¦║ĮĘČć·īÆĪóī¦║ĮŠ½Č╚Ė▀;ūįäė│õļŖŽĄĮy┐╔┐ņ╦┘ča│õōp╩¦Ą─ļŖ┴┐
čb┼õÖCŲ„╚╦ė╔ų„¾wĪó“īäėŽĄĮy║═┐žųŲŽĄĮy╚²éĆ╗∙▒Š▓┐ĘųĮM│╔,ėą3Ī½6éĆ▀\äėūįė╔Č╚Ż¼Ųõųą═¾▓┐═©│Żėą1Ī½3éĆ ▀\äėūįė╔Č╚,┴Ń╝■╣®Įočbų├ų„ę¬ėąĮo┴ŽŲ„║══ą▒PĄ╚
ęŲäėÖCŲ„╚╦ŽĄĮy─Żą═─┐Ū░┐╔Ęų×ķ▀\äėīW─Żą═║═äė┴”īW─Żą═ā╔┤¾ŅÉŻ¼ā╔ĘNŪķørŽ┬ÖCŲ„╚╦▀\ äė┐žųŲėą▓╗═¼Ą─┐žųŲūā┴┐;ęį╦─▌åÖCŲ„╚╦×ķ└²Ż¼Ųõųą║¾├µā╔▌å╩Ūd┴ó“īäė▌åŻ¼Ū░├µā╔▌å╩Ū╚fŽ“▌å