ÖC(j©®)Ų„╚╦┼cęĢėXŽĄĮy(t©»ng)Ą─╔ŅČ╚╚┌║ŽŻ¼┘xėĶÖC(j©®)Ų„╚╦ Ī░č█Š”Ī▒ ║═ Ī░┤¾─XĪ▒Ż¼╩╣ŲõÅ─ Ī░│╠ą“╗»ł╠(zh©¬)ąą╣żŠ▀Ī▒ ╔²J×ķŠ▀éõŁh(hu©ón)Š│Ėąų¬Īóūįų„øQ▓▀─▄┴”Ą─ųŪ─▄¾wĪŻ▀@ĘNĮM║Ž▓╗āH╠ß╔²┴╦ÖC(j©®)Ų„╚╦į┌Å═(f©┤)ļsł÷Š░ųąĄ─▀mæ¬(y©®ng)ąįŻ¼Ė³═Ųäė(d©░ng)┴╦╣żśI(y©©)ūįäė(d©░ng)╗»Īóßt(y©®)»¤Īó╬’┴„Ą╚ŅI(l©½ng)ė“Ž“╚ßąį╗»ĪóųŪ─▄╗»▐D(zhu©Żn)ą═Ż©łD 44Ż®ĪŻ─┐Ū░ų„┴„Ą─ÖC(j©®)Ų„ęĢėXĘĮ╩ĮĘų×ķ 2DęĢėX║═ 3D ęĢėXā╔┤¾ŅÉĪŻ2D ╝╝ąg(sh©┤)Ų▓Į▌^įńŻ¼╝╝ąg(sh©┤)║═æ¬(y©®ng)ė├ę▓ŽÓī”(du©¼)│╔╩ņĪŻŽÓ▌^ė┌ 2D ęĢėXŻ¼3D ęĢėXĖ³ĮėĮ³╚╦č█Ż¼Ųõ║╦ą─į┌ė┌ī”(du©¼) 3D Äū║╬öĄ(sh©┤)ō■(j©┤)Ą─▓╔╝»║═└¹ė├Ż¼į┌é„Įy(t©»ng)Ą─łDŽ±Ņü╔½ą┼Žó═Ōį÷╝ė┴╦┐šķgŠSČ╚Ż¼┐╔½@╚Ī╬’¾wĄ─╔ŅČ╚ą┼ŽóŻ¼īŹ(sh©¬)¼F(xi©żn)ČÓŠSČ╚Č©╬╗ūR(sh©¬)äeĪŻ
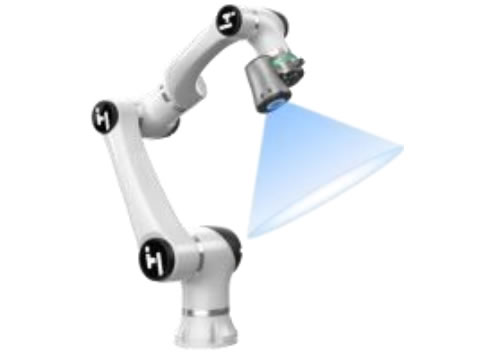
į┌īŹ(sh©¬)ļHæ¬(y©®ng)ė├ųąÖC(j©®)Ų„╚╦+ęĢėX┐╔īŹ(sh©¬)¼F(xi©żn)ČÓł÷Š░╝╝ąg(sh©┤)═╗ŲŲĪŻ╩ųč█ģf(xi©”)š{(di©żo)Ż©Eye-in-HandŻ®Ż║īóŽÓÖC(j©®)░▓čbė┌ģf(xi©”)ū„ÖC(j©®)ąĄ▒█─®Č╦Ż¼═©▀^äė(d©░ng)æB(t©żi)ąŻ£╩(zh©│n)╦ŃĘ©Ż©╚ń Tsai ś╦(bi©Īo)Č©Ę©Ż®Ž¹│²▀\(y©┤n)äė(d©░ng)š`▓ŅŻ¼īŹ(sh©¬)¼F(xi©żn) Ī░ęŲäė(d©░ng)ųąīŹ(sh©¬)Ģr(sh©¬)Č©╬╗Ī▒Ż╗└²╚ńŻ¼╚AčžÖC(j©®)Ų„╚╦Ż©HUAYANŻ®╝ż╣Ō║ĖĮėŽĄĮy(t©»ng)▓╔ė├╩ųč█ęĢėXŻ¼┐╔į┌ÖC(j©®)ąĄ▒█ęŲäė(d©░ng)Ģr(sh©¬)Ė·█Ö║Ė┐pŲ½▓Ņ▓óīŹ(sh©¬)Ģr(sh©¬)š{(di©żo)š¹Ż¼║ĖĮė║ŽĖ±┬╩┤¾Ę∙╠ß╔²ĪŻČÓŽÓÖC(j©®)ģf(xi©”)═¼Ż║į┌Ų¹▄ć┐éčbł÷Š░▓┐╩ČÓ┼_(t©ói)ęĢėXŽÓÖC(j©®)Ż¼Å─▓╗═¼ĮŪČ╚Æ▀├Ķ▄ć╔Ēū╦æB(t©żi)Ż¼ÖC(j©®)Ų„╚╦Ė∙ō■(j©┤)╚┌║ŽöĄ(sh©┤)ō■(j©┤)š{(di©żo)š¹čb┼õ┴”Č╚Ż¼┤¾Ę∙ĮĄĄ═▄ćķT░▓čbķgŽČš`▓ŅĪŻ
╬┤üĒīóėąįĮüĒįĮČÓĄ─ģf(xi©”)ū„ÖC(j©®)Ų„╚╦┤Ņ▌dęĢėXŽĄĮy(t©»ng)ęįØMūŃ╣żÅS╚ßąį╗»ĪóųŪ─▄╗»Ą─╔·«a(ch©Żn)ąĶŪ¾ĪŻ
ģf(xi©”)ū„ÖC(j©®)Ų„╚╦į┌╩ął÷╔ŽĄ─│╔╣”æ¬(y©®ng)ė├Ż¼ ėąų·ė┌╠ßĖ▀╚╦éāī”(du©¼)ÖC(j©®)Ų„╚╦╝╝ąg(sh©┤)Ą─šJ(r©©n)ų¬Č╚║═Įė╩▄Č╚Ż¼×ķ╚╦ą╬ÖC(j©®)Ų„╚╦Ą─╩ął÷═ŲÅV┤“Ž┬╗∙ĄA(ch©│);ę╗ą®×ķ╚╦ą╬ÖC(j©®)Ų„╚╦čą░l(f©Ī)Ą─Ė▀ąį─▄é„ĖąŲ„║═▌p┴┐╗»▓─┴ŽŻ¼┐╔─▄Ģ■(hu©¼)ųØuæ¬(y©®ng)ė├ĄĮģf(xi©”)ū„ÖC(j©®)Ų„╚╦ųąŻ¼╠ßĖ▀ģf(xi©”)ū„ÖC(j©®)Ų„╚╦Ą─ąį─▄║═ĖéĀÄ┴”
╣żū„šŠ▒žĒÜįO(sh©©)ų├Ė„ĘNé„ĖąŲ„,«ö(d©Īng)╚╦åT¤o╣╩▀M(j©¼n)╚ļĘ└ūo(h©┤)ģ^(q©▒)Ģr(sh©¬)Ż¼┴ó╝┤╩╣╣żū„šŠųąĄ─Ė„ĘN▀\(y©┤n)äė(d©░ng)įO(sh©©)éõ═Żų╣╣żū„;╗“ÖC(j©®)Ų„╚╦╝░Ųõų▄▀ģįO(sh©©)éõ▒žĒÜį┌ĮĄ╦┘Śl╝■Ž┬åóäė(d©░ng)▀\(y©┤n)▐D(zhu©Żn)
ÖC(j©®)Ų„╚╦╩ų═¾╦∙─▄ūź╚ĪĄ─┘|(zh©¼)┴┐╩ŪÖC(j©®)Ų„╚╦ę╗éĆ(g©©)ųžę¬ąį─▄ųĖś╦(bi©Īo);ÖC(j©®)Ų„╚╦Ą─├¹┴x╣żū„┐šķg╩ŪÖC(j©®)Ų„╚╦Ą─┴Ē ę╗ éĆ(g©©)ųžę¬ąį─▄ųĖś╦(bi©Īo);ūįė╔Č╚╩Ūʱ┐╔ęįį┌ū„śI(y©©)ĘČć·ā╚(n©©i)ØMūŃū„śI(y©©)Ą─ū╦æB(t©żi)ę¬Ū¾
╣╠Č©┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Į╩Ūį┌ŅA(y©┤)Č©ąą±é┬ĘÅĮ╔ŽįO(sh©©)ų├ī¦(d©Żo)ę²ė├Ą─ą┼Žó├ĮĮķ╬’,ÖC(j©®)Ų„╚╦į┌ąą±é▀^│╠ųąīŹ(sh©¬)Ģr(sh©¬)Öz£yą┼Žó├ĮĮķ╬’Ą─ą┼ŽóČ°Ą├ĄĮī¦(d©Żo)ę²;ūįė╔┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Į╩Ūį┌AGV╔Žā”(ch©│)┤µų°ąą±éģ^(q©▒)ė“▓╝Šų╔ŽĄ─│▀┤ńū°ś╦(bi©Īo)Ż¼═©▀^ę╗Č©Ą─ĘĮĘ©ūR(sh©¬)äe▄ć¾wĄ─«ö(d©Īng)Ū░ĘĮ╬╗
AGV┐žųŲŲ„╩Ū╠Ä└ĒŲ„║╦ą─;“ī(q©▒)äė(d©░ng)ŽĄĮy(t©»ng)╝»│╔┴╦ąą±é┼c▐D(zhu©Żn)Ž“ā╔éĆ(g©©)å╬į¬;ī¦(d©Żo)║ĮŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)Šo£ÉĪó╩╣ė├║åå╬Īóī¦(d©Żo)║ĮĘČć·īÆĪóī¦(d©Żo)║ĮŠ½Č╚Ė▀;ūįäė(d©░ng)│õļŖŽĄĮy(t©»ng)┐╔┐ņ╦┘ča(b©│)│õōp╩¦Ą─ļŖ┴┐
čb┼õÖC(j©®)Ų„╚╦ė╔ų„¾wĪó“ī(q©▒)äė(d©░ng)ŽĄĮy(t©»ng)║═┐žųŲŽĄĮy(t©»ng)╚²éĆ(g©©)╗∙▒Š▓┐ĘųĮM│╔,ėą3Ī½6éĆ(g©©)▀\(y©┤n)äė(d©░ng)ūįė╔Č╚Ż¼Ųõųą═¾▓┐═©│Żėą1Ī½3éĆ(g©©) ▀\(y©┤n)äė(d©░ng)ūįė╔Č╚,┴Ń╝■╣®Įočbų├ų„ę¬ėąĮo┴ŽŲ„║══ą▒PĄ╚
ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦ŽĄĮy(t©»ng)─Żą═─┐Ū░┐╔Ęų×ķ▀\(y©┤n)äė(d©░ng)īW(xu©”)─Żą═║═äė(d©░ng)┴”īW(xu©”)─Żą═ā╔┤¾ŅÉŻ¼ā╔ĘNŪķørŽ┬ÖC(j©®)Ų„╚╦▀\(y©┤n) äė(d©░ng)┐žųŲėą▓╗═¼Ą─┐žųŲūā┴┐;ęį╦─▌åÖC(j©®)Ų„╚╦×ķ└²Ż¼Ųõųą║¾├µā╔▌å╩Ūd┴ó“ī(q©▒)äė(d©░ng)▌åŻ¼Ū░├µā╔▌å╩Ū╚fŽ“▌å
é„äė(d©░ng)ÖC(j©®)śŗ(g©░u)ė├üĒ░č“ī(q©▒)äė(d©░ng)Ų„Ą─▀\(y©┤n)äė(d©░ng)é„▀fĄĮĻP(gu©Īn)╣Ø(ji©”)║═äė(d©░ng)ū„▓┐╬╗ĪŻÖC(j©®)Ų„╚╦│Żė├Ą─é„äė(d©░ng)ÖC(j©®)śŗ(g©░u)ėąĮzĖ▄é„äė(d©░ng)ÖC(j©®)śŗ(g©░u)Īó²X▌åé„äė(d©░ng)ÖC(j©®)śŗ(g©░u)Īó┬▌ą²é„äė(d©░ng)ÖC(j©®)śŗ(g©░u)ĪóĦ╝░µ£é„äė(d©░ng)Īó▀BŚU╝░═╣▌åé„äė(d©░ng)
ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ą─ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)ą╬╩Įų„ę¬ėąŻ║▄ć▌å╩ĮęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Ż╗┬─Ħ╩ĮęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Ż╗═╚ūŃ╩ĮęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)ĪŻ┤╦═ŌŻ¼▀Ćėą▓Į▀M(j©¼n)╩ĮęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Īó╚õäė(d©░ng)╩ĮęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Īó╗ņ║Ž╩ĮęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)║═╔▀ąą╩ĮęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Ą╚
ūįė╔Č╚╩ŪųĖÖC(j©®)Ų„╚╦╦∙Š▀ėąĄ─¬Ü(d©▓)┴óū°ś╦(bi©Īo)▌S▀\(y©┤n)äė(d©░ng)Ą─öĄ(sh©┤)─┐,┐╔─▄╔┘ė┌6éĆ(g©©)ūįė╔Č╚,ę▓┐╔─▄ČÓė┌6éĆ(g©©)ūįė╔Č╚;ÖC(j©®)Ų„╚╦Š½Č╚░³└©Č©╬╗Š½Č╚║═ųžÅ═(f©┤)Č©╬╗Š½Č╚,╚ĪøQė┌Č©╬╗ĘĮ╩Į,▀\(y©┤n)äė(d©░ng)╦┘Č╚,┐žųŲĘĮ╩ĮĪó▒█▓┐äéČ╚,“ī(q©▒)äė(d©░ng)ĘĮ╩ĮĪóŠÅø_ĘĮĘ©Ą╚ę“╦ž
ÖC(j©®)Ų„╚╦Ą─“ī(q©▒)äė(d©░ng)ĘĮ╩Įų„ę¬ ėąę║ē║ĪóÜŌē║ĪóļŖÜŌŻ¼ęį╝░ą┬ą═“ī(q©▒)äė(d©░ng)ĘĮ╩Į;┐╔ęį▀M(j©¼n)ąąÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)ŽĄĮy(t©»ng)Ą─įO(sh©©)ėŗ(j©¼);ÖC(j©®)Ų„╚╦▀\(y©┤n)äė(d©░ng)ą╬╩Į╗“ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Ą─▀xō±;é„äė(d©░ng)ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)ėą│ŻęŖĄ─²X▌åé„äė(d©░ng)Īóµ£é„äė(d©░ng)Īó╬ü▌å╬üŚUé„äė(d©░ng)║═ąąąŪ²X▌åé„äė(d©░ng)
ā╚(n©©i)é„ĖąŲ„│Żį┌┐žųŲŽĄĮy(t©»ng)ųąŻ¼ė├ū„Ę┤üį¬╝■Ż¼Öz£yÖC(j©®)Ų„╚╦ūį╔ĒĄ─ĀŅæB(t©żi)ģóöĄ(sh©┤);═Ōé„ĖąŲ„ų„ę¬ė├üĒ£y┴┐ÖC(j©®)Ų„╚╦ų▄▀ģŁh(hu©ón)Š│ģóöĄ(sh©┤),ę▓┐╔ęįė├üĒÖz£yšŽĄK╬’