AGV ų«╦∙ęį─▄░┤ššŅA(y©┤)Č©Ą─┬ĘÅĮąą±é╩Ūę└┘ćė┌═ŌĮńĄ─š²┤_ī¦(d©Żo)ę²ĪŻī” AGV ▀Mąąī¦(d©Żo)ę²Ą─ĘĮ╩Į┐╔Ęų×ķā╔┤¾ŅÉŻ║╣╠Č©┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Į║═ūįė╔┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩ĮĪŻ
(1)╣╠Č©┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Į
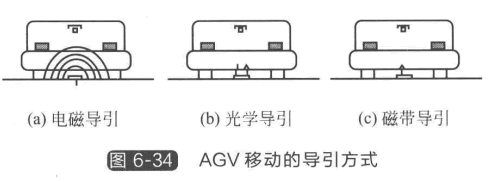
╣╠Č©┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Į╩Ūį┌ŅA(y©┤)Č©ąą±é┬ĘÅĮ╔ŽįO(sh©©)ų├ī¦(d©Żo)ę²ė├Ą─ą┼Žó├ĮĮķ╬’Ż¼ųŪ─▄ÖCŲ„╚╦į┌ąą±é▀^│╠ųąīŹĢrÖz£yą┼Žó├ĮĮķ╬’Ą─ą┼ŽóČ°Ą├ĄĮī¦(d©Żo)ę²ĪŻ░┤ī¦(d©Żo)ę²ė├Ą─ą┼Žó├ĮĮķ╬’▓╗═¼Ż¼╣╠Č©┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Į ų„ę¬ėąļŖ┤┼ī¦(d©Żo)ę²Īó╣ŌīWī¦(d©Żo)ę²Īó┤┼ī¦(d©Żo)ę²ĪóĮī┘Ħī¦(d©Żo)ę²Ą╚Ż¼╚ńłD6-34║═łD6-35╦∙╩ŠĪŻ
╚ńłD6-34(a) ╦∙╩ŠŻ¼ļŖ┤┼ī¦(d©Żo)ę²╩Ū╣żśI(y©©)ė├AGV ŽĄĮy(t©»ng)ųąZ×ķÅVĘ║ĪóZ×ķ│╔╩ņĄ─ę╗ĘNī¦(d©Żo)ę²ĘĮ ╩ĮĪŻ╦³ąĶį┌ŅA(y©┤)Č©ąą±é┬ĘÅĮĄ─Ąž├µŽ┬ķ_═┌Ąž▓█▓ó┬±įO(sh©©)ļŖ└|Ż¼═©ęįĄ═ē║Ą═ŅlļŖ┴„ĪŻįōĮ╗┴„ļŖą┼╠¢ čžļŖ└|ų▄ć·«a(ch©Żn)╔·┤┼ł÷Ż¼AGV ╔Žčbėąā╔éĆĖąæ¬(y©®ng)ŠĆ╚”Ż¼┐╔ęįÖz£y┤┼ł÷ÅŖ╚§▓óęįļŖē║▒Ē╩Š│÷üĒĪŻ ▒╚╚ńŻ¼«öī¦(d©Żo)ę²▌åŲ½ļxĄĮī¦(d©Żo)ŠĆĄ─ėęĘĮĢrŻ¼ū¾é╚(c©©)Ėąæ¬(y©®ng)ŠĆ╚”┐╔Ėąæ¬(y©®ng)ĄĮ▌^Ė▀Ą─ļŖē║Ż¼┤╦ą┼╠¢┐žųŲī¦(d©Żo)Ž“ ļŖÖC╩╣AGV Ą─ī¦(d©Żo)Ž“▌åĖ·█ÖŅA(y©┤)Č©Ą─ī¦(d©Żo)ę²┬ĘÅĮĪŻļŖ┤┼ī¦(d©Żo)ę²ĘĮ╩ĮŠ▀ėą▓╗┼┬╬█╚ŠŻ¼ļŖ└|▓╗Ģ■įŌĄĮŲŲ ē─Ż¼▒Ńė┌═©ą┼║═┐žųŲŻ¼═Ż╬╗Š½Č╚▌^Ė▀Ą╚ā×(y©Łu)³cĪŻĄ½╩Ū▀@ĘNī¦(d©Żo)ę²ĘĮ╩ĮąĶę¬į┌Ąž├µ╔Žķ_═┌£Ž▓█Ż¼▓ó ŪęĖ─ūā║═öU│õ┬ĘÅĮę▓▒╚▌^┬ķ¤®Ż¼┬ĘÅĮĖĮĮ³Ą─ĶF┤┼¾w┐╔─▄Ģ■Ė╔ö_ī¦(d©Żo)ę²╣”─▄ĪŻ
╚ńłD6-34(b) ╦∙╩ŠŻ¼╣ŌīWī¦(d©Żo)ę²ĘĮ╩Į╩Ūį┌Ąž├µŅA(y©┤)Č©Ą─ąą±é┬ĘÅĮ╔Ž═┐ęį┼cĄž├µėą├„’@╔½▓Ņ Ą─Š▀ėąę╗Č©īÆČ╚Ą─ŲßĦŻ¼AGV ╔Ž╣ŌīWÖz£yŽĄĮy(t©»ng)Ą─ā╔╠ū╣Ō├¶į¬╝■Ęųäe╠Äė┌ŲßĦĄ─ā╔é╚(c©©)Ż¼ė├ęį Ė·█Ö AGV Ą─ĘĮŽ“ĪŻ«öAGV Ų½ļxī¦(d©Żo)ę²┬ĘÅĮĢrŻ¼ā╔╠ū╣Ō├¶į¬╝■Öz£yĄĮĄ─┴┴Č╚▓╗Ą╚Ż¼ė╔┤╦ą╬│╔ ą┼╠¢▓ŅųĄŻ¼ė├üĒ┐žųŲ AGV Ą─ĘĮŽ“Ż¼╩╣Ųõ╗žĄĮī¦(d©Żo)ę²┬ĘÅĮ╔ŽĪŻ╣ŌīWī¦(d©Żo)ę²ĘĮ╩ĮĄ─ī¦(d©Żo)ę²ą┼Žó├ĮĮķ╬’ ▒╚▌^║åå╬Ż¼ŲßĦ┐╔į┌╚╬║╬ŅÉą═Ą─Ąž├µ╔Ž═┐ų├Ż¼┬ĘÅĮęūė┌Ė³Ė─┼cöU│õĪŻ
╚ńłD6-34(c) ╦∙╩ŠŻ¼ęįĶFč§┤┼¾w┼cśõų¼ĮM│╔Ą─┤┼Ħ┤·╠µŲßĦŻ¼AGV ╔Žčbėą┤┼ąįĖąæ¬(y©®ng)Ų„Ż¼ ą╬ │╔ ┴╦ ┤┼ Ħ ī¦(d©Żo) ę² ĘĮ ╩Į ĪŻ
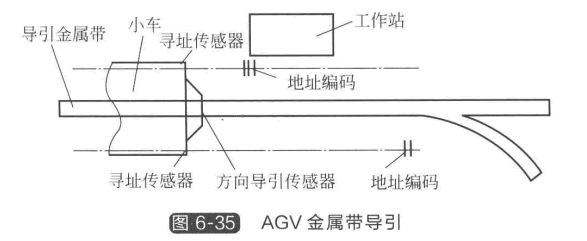
Įī┘Ħī¦(d©Żo)ę²╚ńłD6-35╦∙╩ŠŻ¼į┌Ąž├µŅA(y©┤)Č©Ą─ąą±é┬ĘÅĮ╔ŽõüįO(sh©©)śO▒ĪĄ─Įī┘ĦŻ¼Įī┘Ħ┐╔ęį ė├õX▓─Ż¼ė├─zīóŲõ└╬└╬Ąžš│į┌Ąž├µ╔ŽĪŻ▓╔ė├─▄Öz£yĮī┘Ą─é„ĖąŲ„ū„×ķĘĮŽ“?q©▒)¦ę²é„ĖąŲ„Ż¼ė├ė? AGV ┼c┬ĘÅĮų«ķgŽÓī”╬╗ų├Ė─ūāą┼╠¢Ą─Öz£yŻ¼═©▀^ę╗Č©Ą─▀ē▌ŗ┼ąöÓŻ¼┐žųŲŲ„░l(f©Ī)│÷╝mŲ½ųĖ┴ŅŻ¼ Å─Č°╩╣ AGV čžų°Įī┘ĦõüįO(sh©©)Ą─┬ĘÅĮąąū▀Ż¼═Ļ│╔╣żū„╚╬äš(w©┤)ĪŻū„×ķÖz£yĮī┘▓─┴ŽĄ─é„ĖąŲ„Ż¼│Ż ė├Ą─ėą£u┴„ą═Īó╣ŌļŖą═Īó╗¶Ā¢ą═║═ļŖ╚▌ą═Ą╚ĪŻ£u┴„ą═é„ĖąŲ„ī”╦∙ėąĮī┘▓─┴ŽČ╝Ųū„ė├Ż¼ī”Į ī┘Ħ▒Ē├µę¬Ū¾ę▓▓╗Ė▀Ż¼╣╩▓╔ė├£u┴„ą═é„ĖąŲ„Öz£yĮī┘Ħ×ķ║├Ż¼╚ńłD6-36╦∙╩ŠĪŻłD6-37▒Ē╩Š ę╗ĮMĘĮŽ“?q©▒)¦ę²é„ĖąŲ„Ż¼ė╔ū¾ĪóųąĪóėę╚²éĆ£u┴„ą═é„ĖąŲ„ĮM│╔Ż¼▓óė├╣╠Č©ų¦╝▄░▓čbį┌ąĪ▄ćĄ─Ū░ ▓┐ĪŻĮī┘Ħī¦(d©Żo)ę²╩Ūę╗ĘN¤oļŖį┤Īó¤oļŖ╬╗Įī┘ī¦(d©Żo)ę²Ż¼╝╚▓╗ąĶę¬Įoī¦(d©Żo)ę²Įī┘Ħ╣®ĮoļŖį┤ą┼╠¢Ż¼ę▓ ▓╗ąĶę¬īóĮī┘Ħ┤┼╗»Ż¼Įī┘Ħš│┘NĘŪ│ŻĘĮ▒ŃŻ¼Ė³Ė─ąą±é┬ĘÅĮę▓▒╚▌^╚▌ęūŻ¼═¼Ģrį┌Łh(hu©ón)Š│╬█╚ŠĄ─ ŪķørŽ┬Ż¼ī¦(d©Żo)ę²čbų├ī”Įī┘Ħ╚į─▄ėąą¦ĄžŲū„ė├Ż¼▓óŪęĮī┘ĦśO▒ĪŻ¼▓ó▓╗įņ│╔Ąž├µšŽĄKĪŻ╦∙ ęįŻ¼┼cŲõ╦¹ī¦(d©Żo)ę²ĘĮ╩Į▒╚▌^Ż¼Įī┘Ħī¦(d©Żo)ę²╩Ū╣╠Č©┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Įųą┐╔┐┐ąįĖ▀Īó│╔▒ŠĄ═Īó║åå╬ņ` ╗ŅŻ¼▀m║Ž╣ż│╠æ¬(y©®ng)ė├Ą─ę╗ĘN AGV ī¦(d©Żo)ę²╝╝ąg(sh©┤)ĪŻ
(2)ūįė╔┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Į
ūįė╔┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Į╩Ūį┌AGV╔Žā”┤µų°ąą±éģ^(q©▒)ė“▓╝Šų╔ŽĄ─│▀┤ńū°ś╦Ż¼═©▀^ę╗Č©Ą─ĘĮĘ©ūRäe▄ć¾wĄ─«öŪ░ĘĮ╬╗Ż¼ųŪ─▄ÖCŲ„╚╦Š═─▄ūįų„ĄžøQČ©┬ĘÅĮČ°Ž“─┐ś╦ąą±éĪŻūįė╔┬ĘÅĮī¦(d©Żo)ę²ĘĮ╩Įų„ę¬ėą ┬ĘÅĮ▄ē█E═Ų╦Ńī¦(d©Żo)ę²Ę©ĪóæTąįī¦(d©Żo)ę²Ę©ĪóŁh(hu©ón)Š│ė│╔õī¦(d©Żo)ę²Ę©Īó╝ż╣Ōī¦(d©Żo)║Įī¦(d©Żo)ę²Ę©Ą╚ĪŻ

ó┘┬ĘÅĮ▄ē█E═Ų╦Ńī¦(d©Żo)ę²Ę©Ż¼░▓čbė┌▄ć▌å╔ŽĄ─╣ŌļŖŠÄ┤aŲ„ĮM│╔▓ŅäėāxŻ¼£y│÷ąĪ▄ć├┐ę╗Ģr┐╠ ▄ć▌å▐D(zhu©Żn)▀^Ą─ĮŪČ╚ęį╝░čž─│ę╗ĘĮŽ“ąą±é▀^Ą─ŠÓļxĪŻį┌AGV Ą─ėŗ╦ŃÖCųąā”┤µų°ŠÓļx▒ĒŻ¼═©▀^┼c £yŠÓĘ©╦∙Ą├Ą─ĘĮ╬╗ą┼Žó▒╚▌^Ż¼AGV Š═─▄╦Ń│÷Å──│ę╗ģóöĄ(sh©┤)³c│÷░l(f©Ī)Ą─ęŲäėĘĮŽ“ĪŻŲõZ┤¾Ą─ā×(y©Łu)³c į┌ė┌Ė─äė┬ĘÅĮ▓╝ŠųĢrŻ¼ų╗ąĶĖ─ūā▄ø╝■╝┤┐╔Ż¼Č°Ųõ╚▒³cį┌ė┌“ī(q©▒)äė▌åĄ─╗¼äėĢ■įņ│╔Š½Č╚ĮĄĄ═ĪŻ
ó┌æTąįī¦(d©Żo)ę²Ę©Ż¼į┌AGV ╔Žčbėą═ė┬▌āxŻ¼ī¦(d©Żo)ę²ŽĄĮy(t©»ng)Å─═ė┬▌āxĄ─£y┴┐ųĄ═Ųī¦(d©Żo)│÷AGV Ą─╬╗ ų├ą┼ŽóŻ¼▄ć▌dėŗ╦ŃÖC╦Ń│÷ AGV ŽÓī”ė┌┬ĘÅĮĄ─╬╗ų├Ų½▓ŅŻ¼Å─Č°╝mš²ąĪ▄ćĄ─ąą±éĘĮŽ“ĪŻįōī¦(d©Żo)ę² ŽĄĮy(t©»ng)Ą─╚▒³c╩ŪārĖ±░║┘FĪŻ
ó█Łh(hu©ón)Š│ė│╔õī¦(d©Żo)ę²Ę©Ż¼ę▓ĘQ×ķėŗ╦ŃÖCęĢėXĘ©ĪŻ═©▀^ī”ų▄ć·Łh(hu©ón)Š│Ą─╣ŌīW╗“│¼┬Ģ▓©ė│╔õŻ¼ AGV ų▄Ų┌ąįĄž«a(ch©Żn)╔·Ųõų▄ć·Łh(hu©ón)Š│Ą─«öŪ░ė│Ž±Ż¼▓óīóŲõ┼cėŗ╦ŃÖCŽĄĮy(t©»ng)ųą┤µā”Ą─Łh(hu©ón)Š│ĄžłD▀Mąą╠ž š„Ųź┼õŻ¼ęį┤╦üĒ┼ąöÓ AGV ūį╔Ē«öŪ░Ą─ĘĮ╬╗Ż¼Å─Č°īŹ¼F(xi©żn)š²┤_ąą±éĪŻŁh(hu©ón)Š│ė│╔õī¦(d©Żo)ę²Ę©Ą─╚ßąį ║├Ż¼Ą½ārĖ±░║┘FŪęŠ½Č╚▓╗Ė▀ĪŻ
ó▄╝ż╣Ōī¦(d©Żo)║Įī¦(d©Żo)ę²Ę©Ż¼į┌AGV Ą─D▓┐Ę┼ų├ę╗éĆčž360ĪŃ░┤ę╗Č©Ņl┬╩░l(f©Ī)╔õ╝ż╣ŌĄ─čbų├Ż¼═¼ Ģrį┌AGV ╦─ų▄Ą─ę╗ą®╣╠Č©╬╗ų├╔ŽĘ┼ų├Ę┤╔õńRŲ¼ĪŻ«öAGV ąą±éĢrŻ¼▓╗öÓĮė╩šĄĮÅ─╚²éĆęčų¬ ╬╗ų├Ę┤╔õüĒĄ─╝ż╣Ō╩°Ż¼Įø(j©®ng)▀^▀\╦ŃŠ═┐╔ęį┤_Č© AGV Ą─š²┤_╬╗ų├Ż¼Å─Č°īŹ¼F(xi©żn)ī¦(d©Żo)ę²ĪŻ
ó▌Ųõ╦¹ĘĮ╩ĮŻ¼į┌Ąž├µ╔Žė├ā╔ĘNŅü╔½Ą─═┐┴Ž═┐│╔ŠW(w©Żng)Ė±ĀŅŻ¼▄ć▌dėŗ╦ŃÖC┤µā”ų°Ąž├µą┼ŽółDŻ¼ ė╔özŽ±ÖC╠Į£yŠW(w©Żng)Ė±ą┼ŽóŻ¼īŹ¼F(xi©żn) AGV Ą─ūį┬╔ąįąąū▀ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äš(w©┤)ÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦(d©Żo)ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦(d©Żo)į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦(d©Żo)ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖCŲ„╚╦ |