AIoT╝╝ąg╝»│╔┴╦╚╦╣żųŪ─▄║═╬’┬ō(li©ón)ŠW(w©Żng)╝╝ągĄ─ā×(y©Łu) ä▌ Ż¼×ķĘ■äšÖCŲ„╚╦┘xėĶ┴╦ųŪ─▄Ėąų¬ĪóīŹĢröĄ(sh©┤)ō■(j©┤) ╠Ä└Ē║═╗ź┬ō(li©ón)╗ź═©Ą──▄┴” Ż¼īŹ¼F(xi©żn)ÖCŲ„╚╦┼c╔·æB(t©żi)ų« ķgĖ„ĘNįOéõĄ─¤o┐pģf(xi©”)═¼ Ż¼╩Ū╚½ŚŻ╩ĮųŪ─▄Ę■äšÖC Ų„╚╦╔·æB(t©żi)Ą─┴Ēę╗║╦ą─╝╝ągĪŻ
AIoT╝╝ągī”Ę■äšÖCŲ„╚╦Ą─┘x─▄ų„ę¬¾w¼F(xi©żn)Ž┬ęįŽ┬ ÄūéĆĘĮ├µŻ║
1. īŹ¼F(xi©żn)įOéõķgĄ─īŹĢr▀BĮė
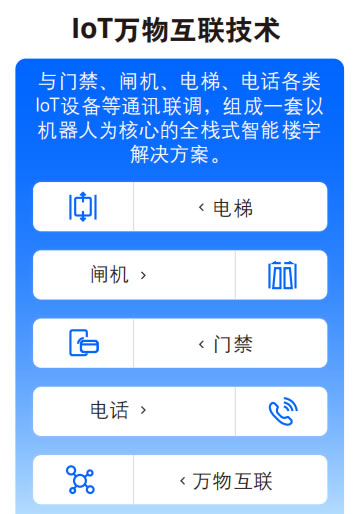
AIoT╝╝ągĄ─║╦ą─į┌ė┌═©▀^╬’┬ō(li©ón)ŠW(w©Żng)╝╝ągų¦│ųĘ■äšÖCŲ„╚╦┼cĖ„ŅÉįOéõŻ©╚ńļŖ╠▌Īó ķTĮ¹ŽĄĮy(t©»ng)Īó ļŖįÆŽĄĮy(t©»ng)Ą╚Ż®Į©┴óīŹĢr▀BĮė Ż¼Å─Č°╩╣ÖCŲ„╚╦Å─╣┬┴ó Ą─▓┘ū„å╬į¬▐Dūā?y©Łu)ķČÓ├µ╗ź┬?li©ón)Ą─ųŪ─▄╔·æB(t©żi)ųąĄ─ę╗ Łh(hu©ón)ĪŻ└²╚ń Ż¼į┌ųŪ─▄śŪėŅųą Ż¼Ę■äšÖCŲ„╚╦┐╔ęį═© ▀^IoT╝╝ąg┼cļŖ╠▌ŽĄĮy(t©»ng)┬ō(li©ón)äėŻ¼īŹ¼F(xi©żn)ūįų„│╦╠▌Ż¼×ķ ė├æ¶Ä¦üĒ╚½ŚŻ╩ĮĄ─ųŪ─▄Ę■äš¾w“×ĪŻ
2. öĄ(sh©┤)ō■(j©┤)╣▓ŽĒ┼cųŪ─▄š{Č╚
╗∙ė┌AIoT╝╝ąg Ż¼Ę■äšÖCŲ„╚╦─▄ē“īŹĢr╩š╝»ų▄ć·Łh(hu©ón)Š│║═įOéõĄ─öĄ(sh©┤)ō■(j©┤)ĪŻ▀@ą®öĄ(sh©┤)ō■(j©┤)į┌įŲŲĮ┼_╗“▒ŠĄž ▀Mąą╝»ųą╠Ä└Ē┼cĘų╬÷ Ż¼×ķÖCŲ„╚╦╠ß╣®ųŪ─▄øQ▓▀ų¦│ų Ż¼īŹ¼F(xi©żn)įŲČ╦╣▄└ĒĪŻ«öĘ■äšÖCŲ„╚╦į┌ł╠(zh©¬)ąą╚╬ 䚯©╚ń┼õ╦═╗“ŪÕØŹŻ® Ģr Ż¼┐╔ęįĖ∙ō■(j©┤)Įė╩šĄĮĄ─īŹ ĢröĄ(sh©┤)ō■(j©┤) Ż¼ā×(y©Łu)╗»╚╬äšł╠(zh©¬)ąąĄ─Ēśą“║═┬ĘÅĮĪŻ└²╚ńŻ¼ į┌┴Ń╩█Łh(hu©ón)Š│ųą Ż¼ŪÕØŹÖCŲ„╚╦┐╔ęįĖ∙ō■(j©┤)╔╠ĄĻ┴„┴┐ öĄ(sh©┤)ō■(j©┤)ūįäėš{š¹ŪÕØŹĢrķg Ż¼▒▄ķ_Ė▀ĘÕĢrČ╬ Ż¼Å─Č° ėąą¦╠ß╔²╣żū„┴„Ą─ą¦┬╩ĪŻ
3. ┐ńįOéõĄ─╚╬äšģf(xi©”)ū„
AIoT╝╝ągĄ─æ¬ė├╩╣Ą├▓╗═¼ŲĘ┼Ų║═ŅÉą═Ą─Ę■äšÖC Ų„╚╦┼cŲõ╦¹įOéõų«ķgĄ─ģf(xi©”)═¼╣żū„│╔×ķ┐╔─▄ĪŻ«ö Ę■äšÖCŲ„╚╦ąĶę¬═¼Ģrį┌ČÓĘNįOéõ║═╣”─▄─ŻēKų« ķgģf(xi©”)š{╣żū„Ģr Ż¼AIoT╝╝ąg×ķŲõ╠ß╣®┴╦ÅŖ┤¾Ą─ų¦ ō╬ĪŻ═©▀^ķ_Ę┼Ą─API║═ś╦£╩╗»Ą─═©ą┼ģf(xi©”)ūhŻ¼Ę■äš ÖCŲ„╚╦─▄ē“╣▓ŽĒą┼Žó┼c┘Yį┤ Ż¼īŹ¼F(xi©żn)šµš²Ą─┐ńįO éõģf(xi©”)ū„ĪŻ└²╚ń Ż¼į┌ßt(y©®)»¤Łh(hu©ón)Š│ųą Ż¼╣żū„┴„│╠═©│Ż ąĶę¬ČÓĘNįOéõ╣▓═¼ģf(xi©”)ū„ Ż¼╦Ä╬’┼õ╦═ÖCŲ„╚╦┐╔ęį ┼cī¦į\ÖCŲ„╚╦ĪóŪÕØŹŽ¹ČŠÖCŲ„╚╦ęį╝░Š»ł¾ŽĄĮy(t©»ng) ║═▒O(ji©Īn)┐žįOéõŽÓ╗ź▀BĮė Ż¼ęįīŹ¼F(xi©żn)ßt(y©®)į║ł÷Š░Ž┬Ą─╚½ ŚŻ╩ĮųŪ─▄╔·æB(t©żi)ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |